















共執行 47 個查詢,用時 0.265393 秒,在線 407 人,Gzip 已啟用,佔用記憶體 4.089 MB
Powered by GEJOREv2.7.3




GR7469-09
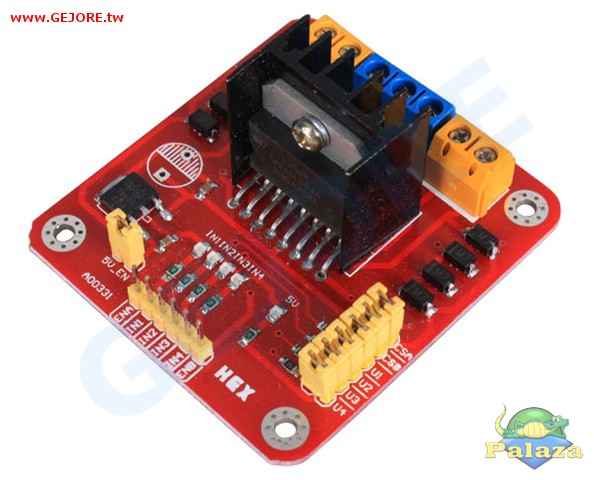
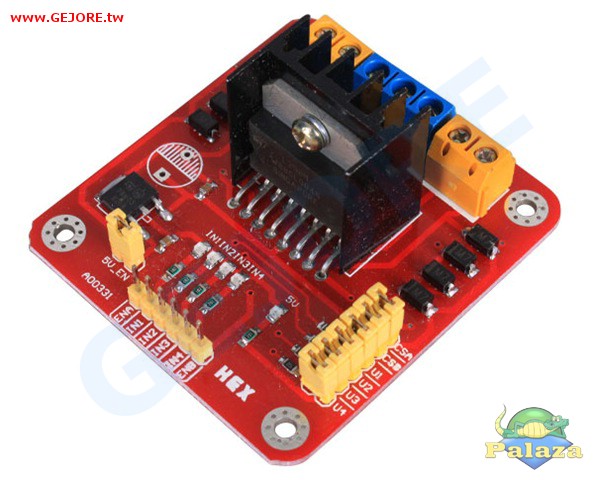
這是一個很方便的 L298N 模組,它可以驅動兩個直流馬達或是一個步進馬達,控制訊號可以用 Arduino 或是其它微控制器輸入。
這塊板子上帶有一個 5V 穩壓器,使用者可以選擇要不要打開 5V 輸出介面,以提供 5V 電源給 Arduino 或其它微控制器。使用方法
產品說明:
本L298N驅動模塊,採用L298N芯片,可以直接驅動兩路3-30V直流電機,並提供了5V輸出接口,可以給5V單片機電路系統供電,支持3.3VMCU控制,可以方便的控制直流電機速度和方向,也可以控制2相步進電機,是智能小車必備。產品參數:
1.驅動芯片:L298N雙H橋驅動芯片
2.驅動部分端子供電範圍VMS:+5V~+35V
3.驅動部分峰值電流Io:2A/橋
4.邏輯部分端子供電範圍Vss:4.5-5.5V
5.邏輯部分工作電流範圍:0~36mA
6.控制信號輸入電壓範圍:高電平4.5-5.5V 低電平0V
7.最大功耗:20W
8.存儲溫度:-25℃~+130℃
9.驅動板尺寸:55mm*60mm*30mm
10.驅動板重量:33g
11.其他功能:控制方向指示燈、電源指示,電流檢測,邏輯部分板內取電接口。
使用的時候,可以參考上圖或是底下兩張表連接電源、馬達以及 Arduino。
端子台 (Terminal Block)
No 名稱 說明 1 A+ Motor A+ 2 A- Motor A- 3 VMS 供電 (+5V ~ 35V) 4 GND Ground 5 5V 5V output 6 B+ Motor B+
排針 (Male Header)
No 名稱 說明 1 ENA Enable Bridge A 2 IN1 Input 1 3 IN2 Input 2 4 IN3 Input 3 5 IN4 Input 4 6 ENB Enable Bridge B 底下這張表說明使用 IN1 與 IN2 控制 Motor A 的方法,Motor B 的控制邏輯也是一樣的,只是要改用 IN3 和 IN4 來控制。
ENA IN1 IN2 功能 HIGH HIGH LOW 馬達正轉 HIGH LOW HIGH 馬達反轉 HIGH IN1=IN2 IN1=IN2 馬達快速停止 LOW ingored ignored 馬達慢速停止
| 會員名稱 | 購買數量 | 購買時間 | 訂單狀態 |
| vli***** | 1 | 10-08 | 成交 |
| 141***** | 1 | 02-11 | 成交 |
| chi***** | 1 | 10-09 | 成交 |